
|
|
Institute of Computer Science — Knowledge-Based Systems Research Group |
The Extension of Lu and Milios SLAM to 6 DOF |

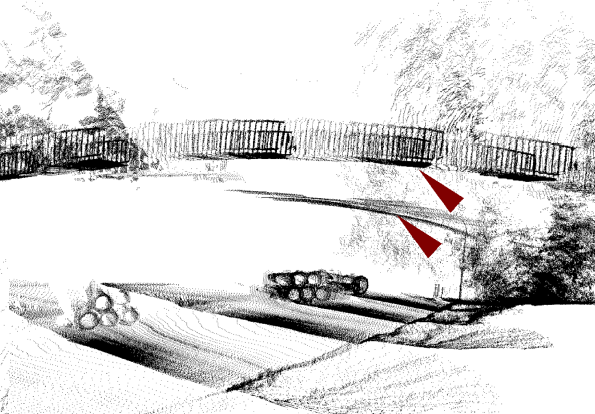
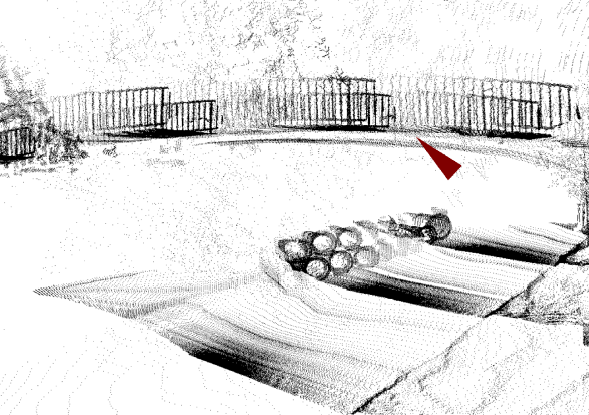
With our robot Kurt3D we drove a six DOF loop over and under the bridge. During the run, the robot took several 3D laser scans. These scans have been matched with ICP (bottom left) and with an extended version of the algorithm of Lu and Milios (bottom right).
Dorit Borrmann and Jan Elseberg, Global konsistente 3D Kartierung am Beispiel des Botanischen Gartens in Osnabrück [PDF], B.Sc. Mathematics / Computer Science, University of Osnabrück, submitted October 2006.
Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter and Joachim Hertzberg. Globally consistent 3D mapping with scan matching. Journal of Robotics and Autonomous Systems, Vol. 56, Issue 2, pages 130 - 142, February 2008, [ScienceDirect Link] [Get Paper] [Get Videos].
Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, and Joachim Hertzberg. The Efficient Extension of Globally Consistent Scan Matching to 6 DoF. In Proceedings of the 4th International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT '08), Available electronically as Tech Report GT-IC-08-05 from the Georgia Institute of Technology, Atlanta, GA, USA, pages 29-36, June 2008 [Get Paper] [Get Video] [Addendum].